







全部分类


美恒MHCASC载荷稳定控制系统-软件V1.0,是由美恒国外专家团队首创的经过多年现场验证的成熟产品,其载荷稳定控制模型采用“用户友好型”易于使用和维护,不需要定期修正参数来保证钩头运行中稳定(不摆动)。
美恒公司的载荷稳定控制器在国外尤其在欧洲市场已有大量的应用业绩,其中也不乏替换其它品牌产品的典型案例。
适用于料场装卸船机、库房起重机、垃圾吊、冶金铸造起重机、夹钳及电磁起重机等需要进行自动化或半自动化控制的起重机。
美恒载荷稳定控制器的使用
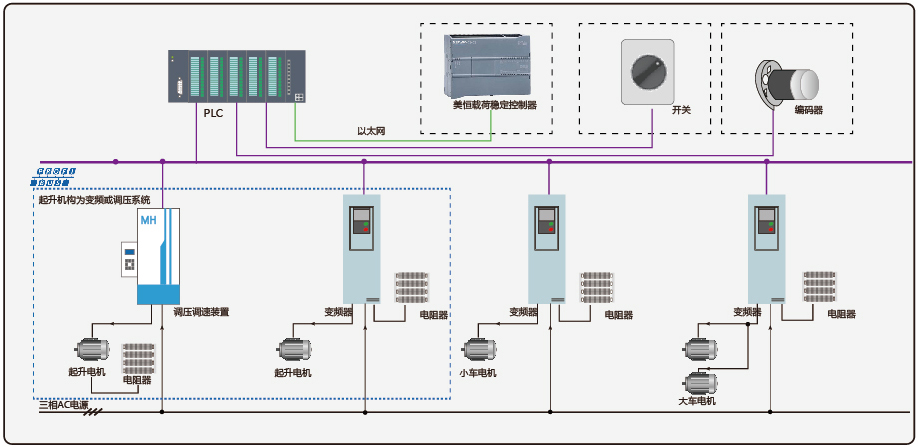
1、起重机控制系统的最基本配置要求:
有PLC控制系统。(推荐使用美恒与SIEMENS 300系列可互换的PLC或SIEMENS其他系列的PLC。其他国际主流的PLC也可使用,但需提前与美恒公司咨询);
大车、小车机构的驱动器必须是变频器,且与PLC通过通讯接口连接。
2、需要增设的设备及软件:
增加美恒载荷稳定控制器:与原系统PLC通过通讯连接;
增加起升机构高度检测:可采用绝对值编码器检测起升卷筒位置,将编码器输出输入原系统PLC内,通过PLC程序,转换为起升高度值;
增加载荷高度修正开关(16位置):将16个位置开关输入原系统PLC内,用于修正载荷重心与钩头中心的距离;
在原PLC软件中增加:美恒载荷稳定控制器软件V1.0 .将美恒提供软件配置到原系统PLC的软件程序中,并根据美恒的使用要求进行配置。
系统架构
美恒载荷稳定控制器的指标参数
载荷摇摆幅度比未采用定位平稳控制措施的减少95% 以上。
自动定位停止后摆动幅值<±5mm。
适应起升、大车、小车三个机构同时(或不同时)运行的载荷稳定控制,特别适合起重机安全区域自动/半自动操作。
美恒载荷稳定控制器的控制方法
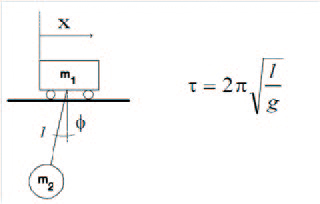
其中:
τ= 摆动周期
π= 3,141592654
g = 重力加速度(9,81)
l = 起升绳的长度
因此我们通过设置的钩头高度检测和修正开关,可以得到载荷的起升高度,通过软件内的模型,可以得到载荷的摆动周期,在运行机构加减速过程中,通过软件中的算法,按照预测的摆动时间,进行下图加减速及时间的控制,即可消除钩头在终点停止时的摆动。
负载重量不影响摆动周期,所以说,如果起升绳长相同,1公斤的摆动周期与1000公斤的摆动周期相同。
载荷的起升高度检测不需要那么精确,一般小于30cm的误差高度校正已经足够了。
智慧化系统解决方案
起重运输机械自动化案例
起重运输机械自动化
冶金
港口与造船
资产管理系统与智能制造案例
矿山
能源
自动生产线
农业(储粮与智慧农业)
橡塑机械
水处理
智能建筑

版权所有:大连美恒时代科技有限公司 辽ICP备05006725号-2 网站建设:中企动力 大连